Autonomous underwater vehicles are making waves – both in the research lab and on the testing grounds of a local lake in the Blacksburg area.
At Virginia Tech, there’s a fascinating place where electrical engineering, ocean engineering, and autonomous underwater robotics collide. It’s called the Center for Marine Autonomy and Robotics, or CMAR.
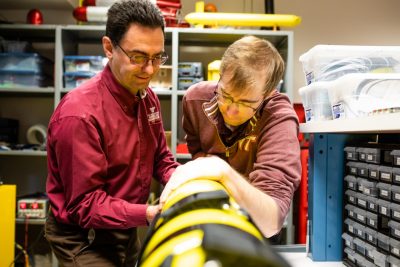
Professor Dan Stilwell of the Bradley Department of Electrical and Computer Engineering (ECE) and Professor Stefano Brizzolara of the Kevin T. Crofton Department of Aerospace and Ocean Engineering (AOE) are the principal investigators of several research projects at CMAR.
The underwater vehicles developed at CMAR can be used for many applications, including sonar mapping, detecting biochemical properties of a body of water, and even finding underwater objects, such as a seamine or lost scuba gear. The overarching goal at CMAR is to develop new robots and to make those robots smart.
Stilwell described the role of his students and Brizzolara's students, and the way those pieces come together.
"My students contribute to autonomy and control, with emphasis on multi-vehicle collaboration," said Stilwell. "We are currently developing new approaches to distributed interference and distributed control that allow our teams of vehicles to develop a joint understanding of the environment around them, and to make joint decisions, and to do so with very limited communication."
Meanwhile, Professor Brizzolara and his team work on hydrodynamics, dynamic models, and propulsion, among other areas. His team has developed state-of-the-art dynamic models of AUVs that are used to predict performance and support design decisions and control design.
"Those models allow the team to predict the performance of an AUV with greater confidence than with existing models. They are also working on next-generation propulsion systems that are more efficient and/or quieter than anything currently available," Stilwell said.



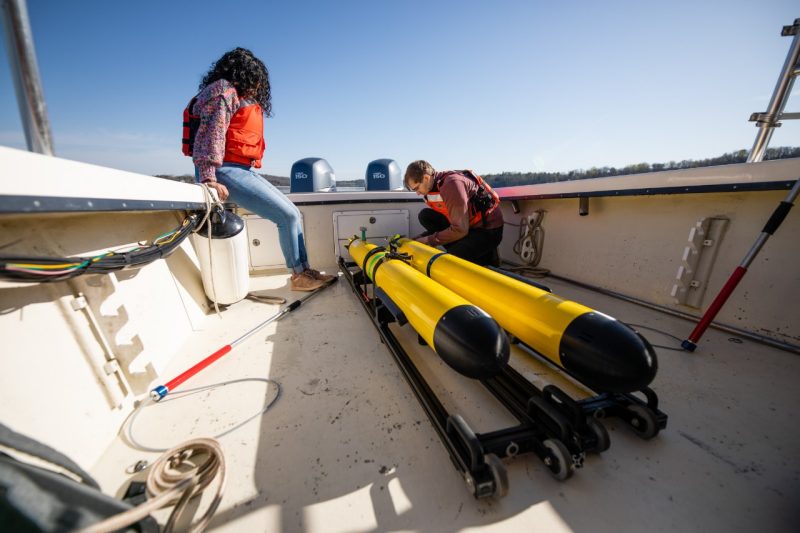
Just thirty minutes south of Virginia Tech’s campus sits Claytor Lake State Park. Stilwell and his team of students frequent the lake with its picturesque trails and sandy beaches to test their AUVs in a “true to life” environment.
Benjamin Biggs described the conditions at Claytor Lake as quite calm, making it easier to launch and recover the subs. Those calm conditions also mean that the team doesn’t have to drive the boat very far out into the lake to find a good area for testing.
“Claytor Lake is an excellent testing ground for our AUVs because it's large enough and deep enough that we can perform meaningful tests,” said Biggs, an electrical and computer engineering Ph.D. candidate. “The lake is also close enough to campus that we can come grab what we need in the morning, travel there, test for several hours, and still have time to process data back in the lab if we need to. That allows us to operate far more often than would otherwise be possible.”



Testing these underwater subs in the murky waters of rural Southwest Virginia isn’t the only real world component to the research. It’s the cross-disciplinary team dynamic that gives these students an educational experience that makes waves.
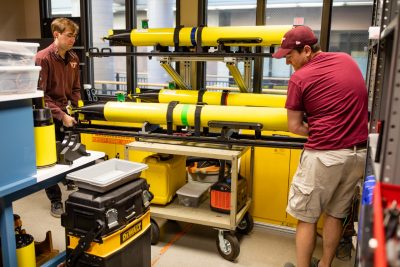
Lakshmi Miller, an aerospace and ocean engineering Ph.D. student, described her role in the development of the AUV as primarily working with the vehicle before it's physically assembled or put into the water and deployed. Much of that work focuses on hydrodynamics and maneuvering models, and adjusting large, high-fidelity simulations of the AUVs (before and after field testing) to ensure that the vehicle maneuvers properly in various environments.
“Building an AUV is a cross-disciplinary experience because hydrodynamics and controls and software integration with hardware are indispensable in terms of which team does what. Both ECE students and AOE students have to come together to create a vehicle like this one,” said Miller.
Dan Stilwell is a big fan of testing these vehicles in outdoor conditions.
“One of my favorite parts about this research is that we get to take these vehicles out into the field for testing. After working hard in the lab, spending a day outside on the boat is hard to beat,” said Stilwell. “Our students all come from different backgrounds but contribute to the same challenging problem, and then they get to see it work out here in the field – very exciting stuff."


The use of AUVs has generally been a very niche field, but it continues to grow. There's increasing demand for AUVs in many applications, including search and rescue, mapping, and environmental monitoring.
Stephen Krauss, an electrical and computer engineering Ph.D. student in Stilwell's research group, commented on both the current technology and the future of AUVs.
"Some of the biggest advancements in the field, which much of our research contributes to, come in the form of algorithms that improve the ability of AUVs to cooperate in teams," said Krauss. "In the future, I believe that swarms of AUVs cooperatively mapping and monitoring the environment will be pivotal to furthering our understanding of the Earth's oceans."
Photos and video by Peter Means
If you want to have an impact on our students and faculty like those featured in this magazine, go here to support the College of Engineering. For more information, call (540) 231-3628.


